CNC ROUTER
The goal of this project was to design and build a CNC router for the purpose of manufacturing parts for underprivelidged West Australian Highschool robotics teams (learn more about that Here) who do not have access to a CNC router.
Specification
With these goals in mind, here is an abbreviated list of criteria for the project to fulfill:
- Budget of ~$1000
- Capable of machining 6061 aluminium at a material-removal rate of 100mm^3/s (A typical low-cost router does half that and with worse quality)
- Accurate to within +/- 0.2..
- Work profile of 400x800x100 to accomodate most FRC parts
- Fits on a desktop and in the back of a Ute
- Automatic homing and computer spindle control
- Homing accuracy of +/- 0.2mm
- Interlocked polycarbonate enclosure
- Electrical cabinet is not a fire hazard
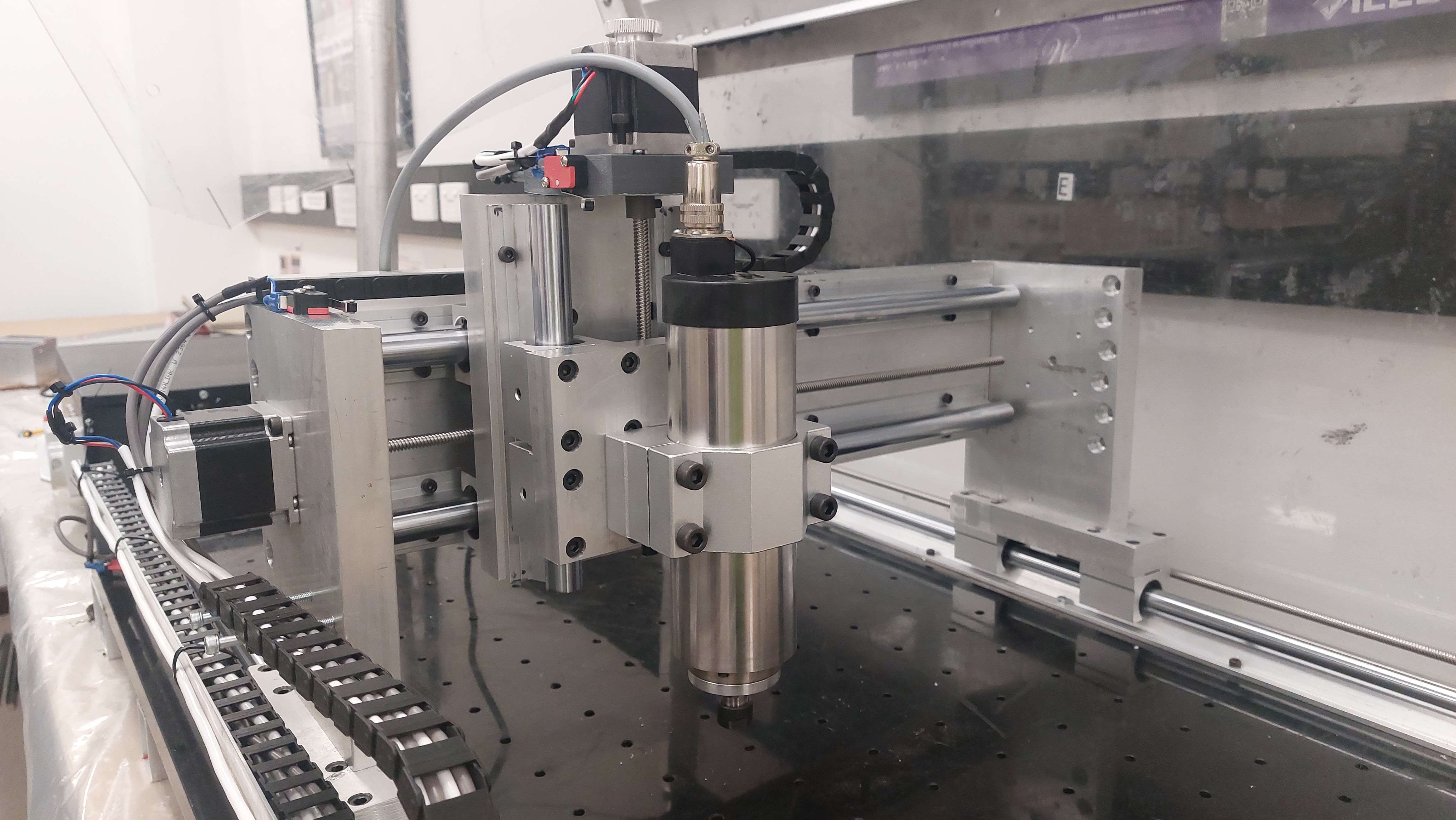
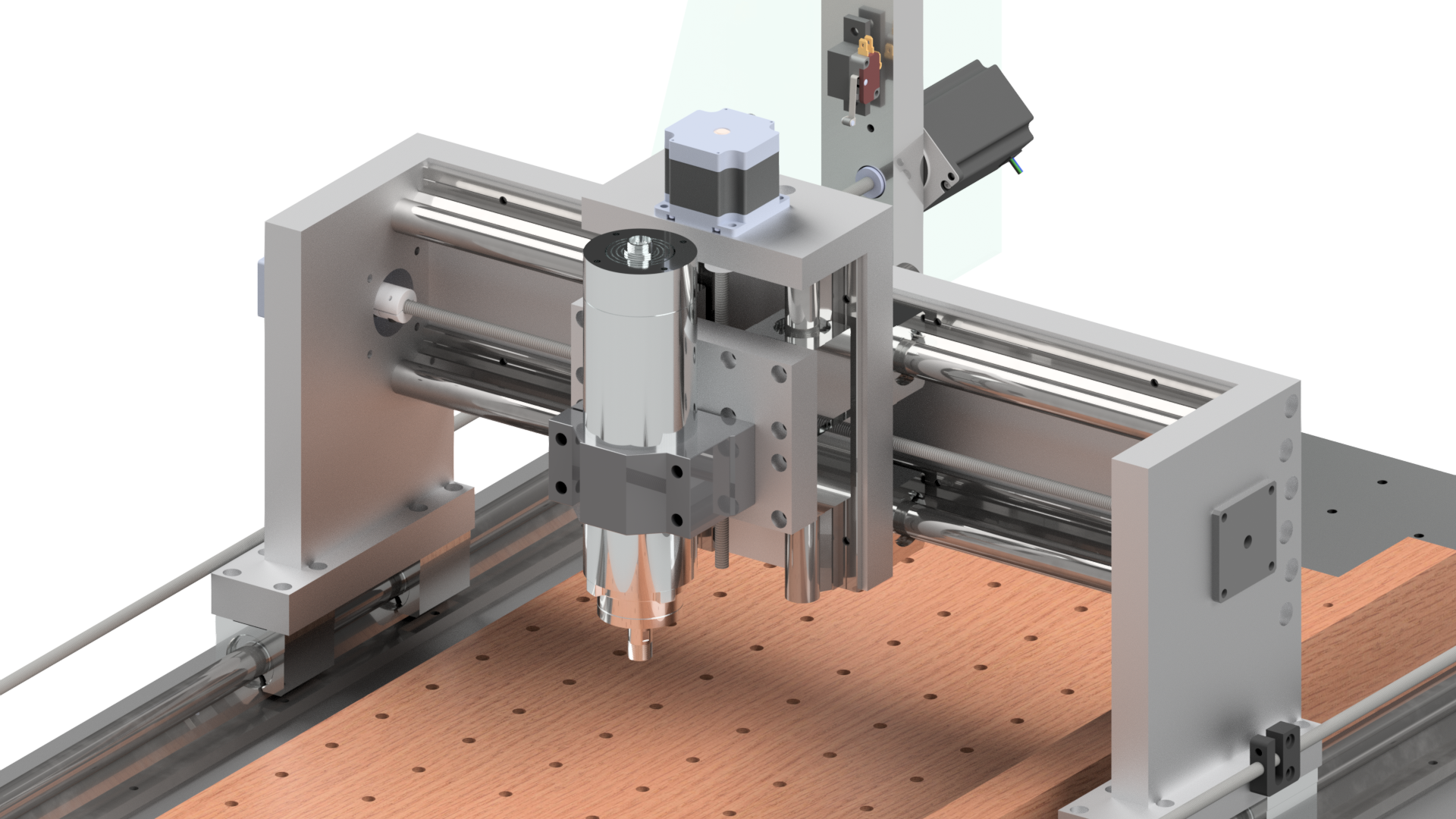
Mechanical Design
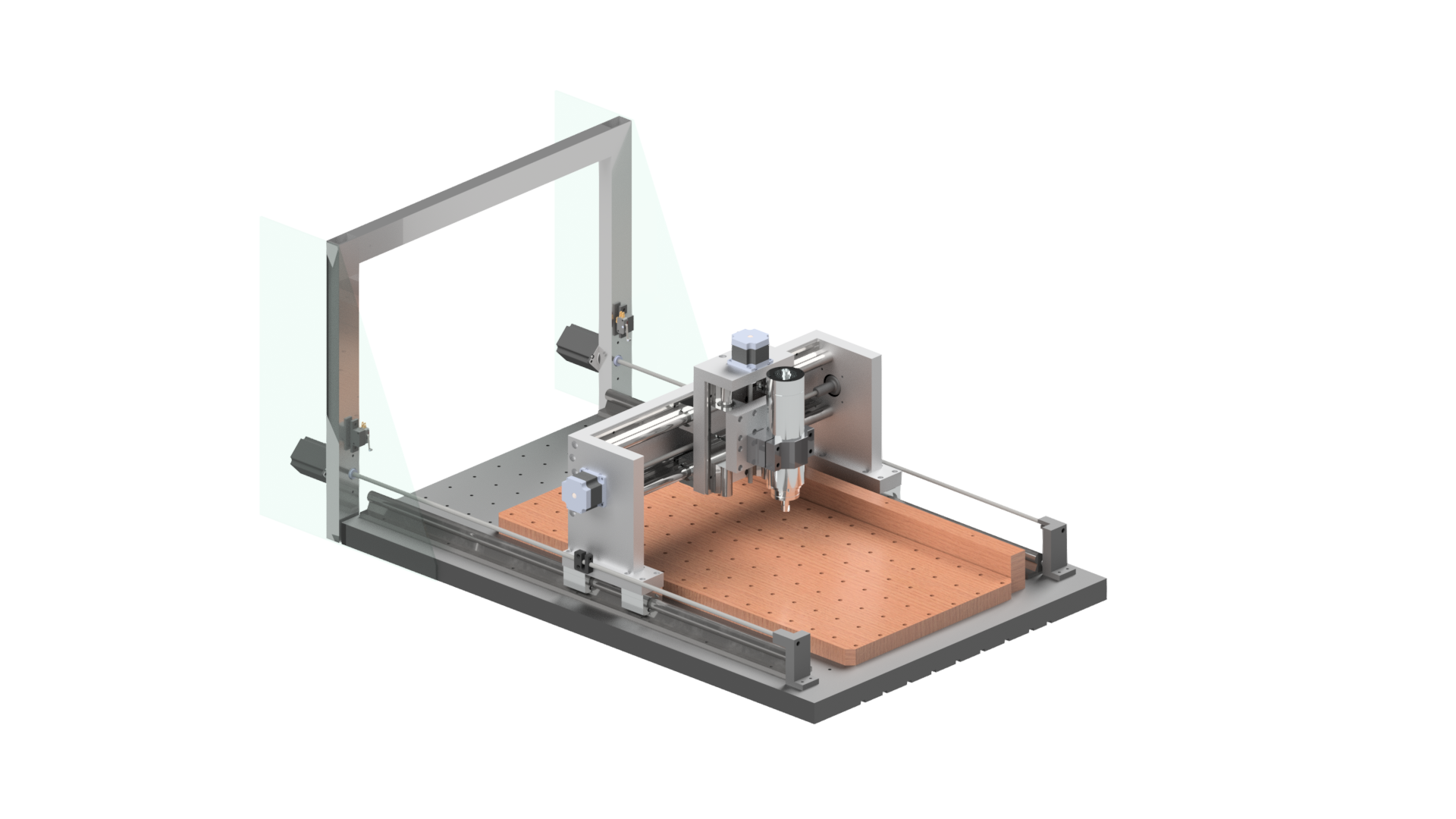

The machine was built around a large HDPE billet
from a surplus plastics store. A local machine
shop kindly
let us use their large wood router
and drill press to manufacture this part. On top of
this sat cheap SBR20 linear rails, on which the
gantry is able to move along the Y axis.
The gantry itself was constructed out of 25x150mm
aluminium flats, with numerous holes drilled along
the surface for components to mount to.
The
zigzag blind hole pattern on the butt ends of the
flats required some jigs, a hydralic jack trolley
and some prayers to get right.

Electrical Cabinet

An old modified eATX desktop case is used to house the electronics, including:
- Master isolator switch and 10A RCBO on input
- 24V 360W PSU for DRIVE motors
- 240V contactor used to cut DRIVE power when E-STOP is pressed
- TB-6600 Stepper drivers for NEMA-23 motors
- 12V PSU for main control board
- Custom ESP32-based controller PCB (see below)
- 240V 1.5kw 3-phase VFD for main spindle motor
- E-STOP and other control buttons and indicators
- DIN rails to mount standard components on
Project Outcome
So far, we have been able to acheive an MRR of 200mm^2/s, double our specified goal! The most time consuming part of the operation is fixing a workpiece and tool changing (perhaps an ATC is on the horizon). We have also surpassed our desired tolerance goal, hitting +/-0.1mm after the lead screws have been adjusted.
Overall, the project was a major success. Following completion in February of 2024, The router has already spent hundreds of hours producing parts for several robotics teams around WA, with many more to come. The lessons learnt designing, manufacturing and operation the machine will be invaluable to My future endeavors.
If you would like more information, I have created a google document detailing the entire design, manufacturing and issues that arose during construction, linked Here.
If you would like to see pictures of some parts produced by the machine, check out the Image Gallery.